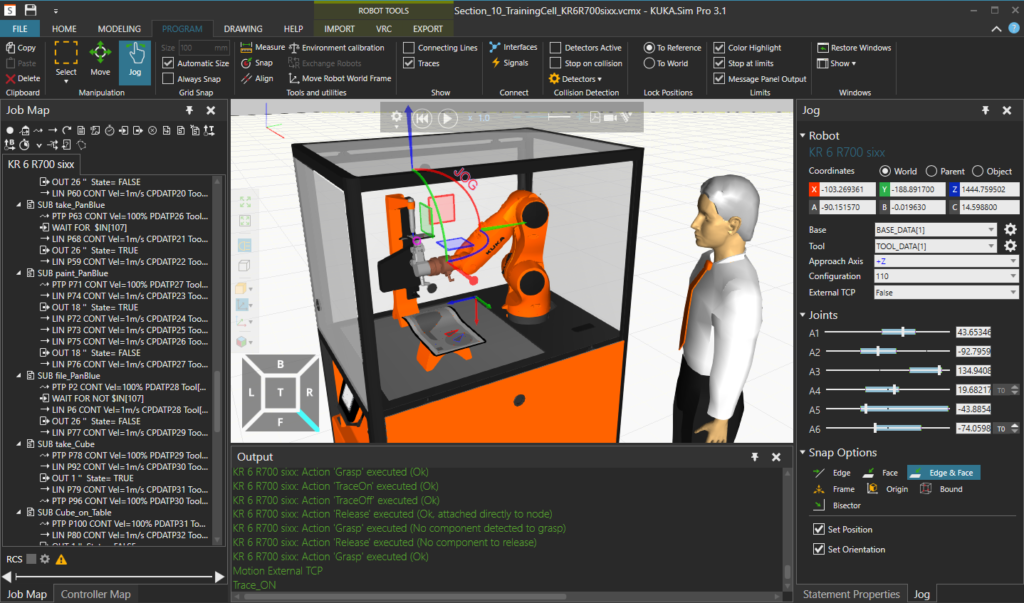
Zur Programmierung des Roboters wird dieser nicht benötigt, die Programmentwicklung erfolgt offline an einem vom Roboter unabhängigen Rechner.
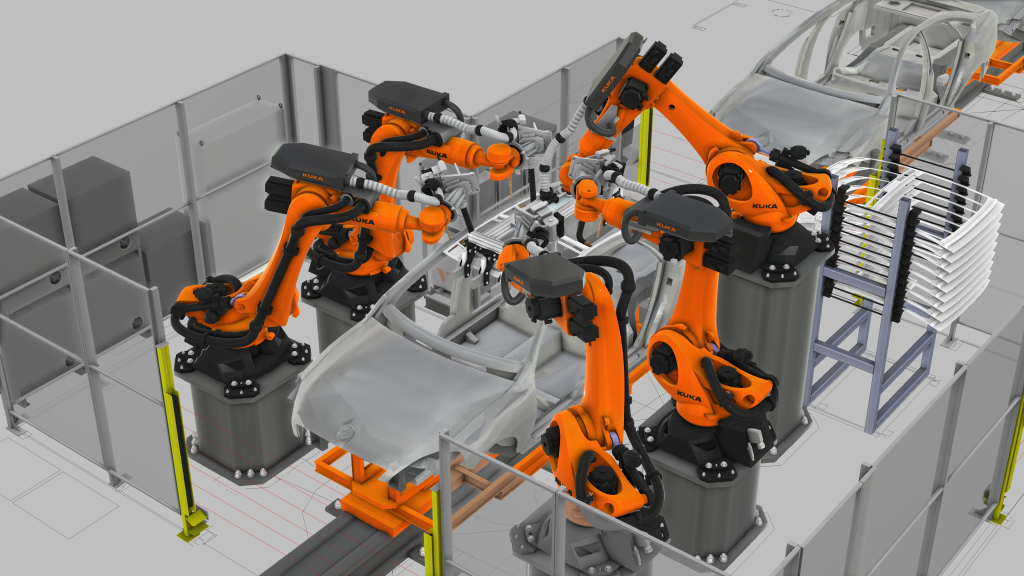
Der gesamte Bewegungsablauf wird am Rechner in einer dreidimensionalen Bildschirmumgebung festgelegt. Dabei sind in der Regel die Umgebung des Roboters und sein Werkzeug ebenfalls abgebildet.
Das fertige und offline getestete Programm wird in den Roboter übertragen und kann dann sofort ausgeführt werden.
Insbesondere bei Bearbeitungsprozessen kann sich die Wirtschaftlichkeit der Roboter durch den Einsatz der Offline-Programmierung erhöhen, da sich die Inbetriebnahmezeiten verkürzen und der Bedarf an nachträglichen Anpassungen reduzieren lassen. Layoutplanung, Zusatzachsen und Mehrroboterlösungen lassen sich ebenfalls komfortabler und transparenter gestalten.